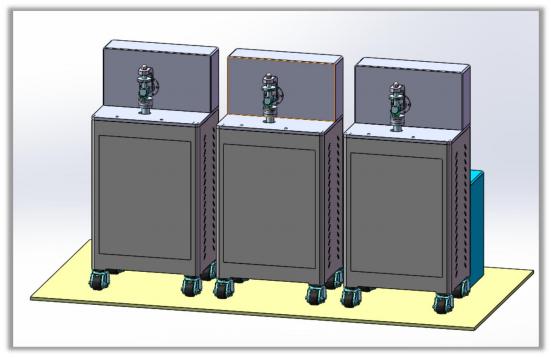
HK Тестер за абење на 3 колена се состои од три дела: тест домаќин, прицврстувач и електронски контролен дел. Може да симулира абење, замор и лупење на импланти на колена и други процеси на оштетување и може да тестира 3 зглобови на коленото истовремено Импланти.
 {608
{608
1 .1 Карактеристики
Тестерот за абење на коленото HK 3 се состои од три дела: тест домаќин, прицврстувач и електронски контролен дел. Може да симулира абење, замор и лупење на импланти на колена и други процеси на оштетување, и може да тестира 3 зглобови на коленото во исто време Импланти. Оваа машина за тестирање автоматски ја контролира тестната сила, времето на тестирање и брзината и ги мери тестната сила и вртежниот момент во реално време. Применливо е за производство, употреба и истражување на протези за колено зглобови и други сродни медицински области.
Погонот на вретеното усвојува увезен серво мотор и контролен систем со наизменична струја, што може да реализира без чекорна регулација на брзината и потребната Пресметајте го константниот вртежен момент/излезната постојана аксијална сила во опсегот на брзина; пробната сила се применува со помош на систем за оптоварување пружини со завртки. Тестната сила се применува стабилно и сигурно, а тестната сила може да ја постави операторот на компјутерскиот интерфејс; брзината на вретеното, Параметрите како што се бројот на вртежи, силата на тестот и времето за тестирање се контролирани од компјутер, кој може да собира податоци од тестот во реално време и да ги нацрта. Соодветната тест крива може да се направи , а податоците од тестот или кривата може да се складираат, извадат и испечатат по желба.
Систем за товарење со тринасочен серво мотор со различни компоненти за комплетна заедничка АП, ротација, флексија Абдукција и други движења, модулот со сензор за сила со четири компоненти ја тестира аксијалната сила на вртежниот момент, хоризонталниот потисок и флексијата, соодветно, Вртежниот момент при продолжување , тринасочен серво склоп опремен со високопрецизен ротационен енкодер, агол во реално време мерење и поместување и обезбедуваат ефективен извор на податоци за контролата на компјутерот домаќин.
Секој механизам за движење е независно контролиран и координиран, со три станици и 15 оски за да се заврши тестот за мелење на оштетување на компонентите на зглобот.
1.2 Главни спецификации
1. Софтвер за работа со инструменти со кинески оперативен интерфејс.
2. Софтверот што работи на инструментот е подготвен за употреба, не е потребен посебен софтвер.
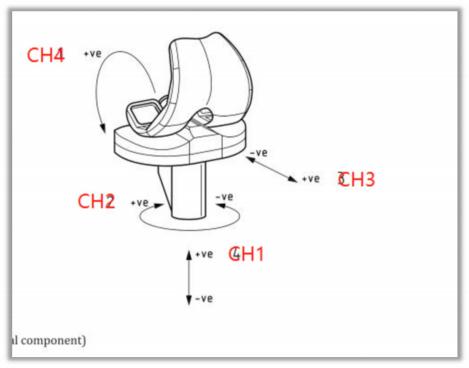
3. Степени на слобода: Секоја тест станица може да реализира флексија / екстензија, внатрешна ротација / надворешна ротација, движење напред / назад, тродимензионална контрола на движењето и оптоварување на аксијалната сила, и секој степен на слобода може да биде контролирани. Се откриваат и сензорот и силата; Можно е слободно движење во насока навнатре/надвор и навнатре/надвор насока.
4. Нелинеарноста на сензорот не е поголема од 0,10% од целосната скала, а хистерезата не е поголема од 0, 10%, повторливоста не е поголема од 0,05% од целосната скала.
5. Опсег на сензор за поместување и поместување: аксијално поместување 100 mm, флексија/продолжување 120, внатрешна ротација/надворешна ротација 20, предно / задно поместување 15 mm, медијално / странично поместување 5 mm.
6. Капацитет на носивост и опсег на сензорот за сила: аксијално оптоварување 3KN, внатрешен/надворешен вртежен момент 20Nm, оптоварување напред/назад 1KN.
7. Точност на контролата на силата и поместувањето: Грешката на силата и амплитудата на поместување во еден циклус не треба да го надминува наведениот максимум Максималната фазна грешка не треба да надминува 3% од целиот циклус. Инструментот се тестира во согласност со ISO 14243-1 и ISO 14243-3 во секој контролиран степен на слобода. Измерени кривини и вредности на отстапување на сензорите за сила и поместување.
8. Има осумканална аналогна влезна функција и може да се синхронизира со надворешни податоци.
9. Тест фреквенција: 1Hz, точност 0,1Hz.
10. Контролен систем: треба да биде опремен со посебен повеќестански, повеќеканален серво-контролер за да се постигне автоматска контрола на сила и поместување во затворена јамка.
11. Контролорот треба да може да изврши компензација за контрола на вредноста од врв до долина за да се осигура дека максималната вредност што ја бара сигналот може точно да се достигне кога циклична бранова форма се користи како контролна инструкција.
12. Треба да може да спроведе програмско тестирање на приспособени криви на одењето; да може да врши чекор-по-чекор рачна контрола на секој контролиран степен на слобода; и да може да извезува необработени податоци во формат Excel.
13. За време на тестот , софтверот треба да може да ги рефлектира кривите на силата и поместувањето на секоја станица во реално време и контролниот систем. Системот треба да може автоматски да ја прилагодува кривата на движење на примерокот за да одговара на целната крива без рачна интервенција.
14. Стапка на контрола на затворена јамка во реално време ≤ 6 kHz , освен за режимот за контрола на сила и поместување, контролорот треба да може да го имплементира пресметаниот режим на контрола на променливата.
15. Фреквенцијата на дигитално земање примероци не треба да биде помала од 100 kHz, а методот на земање примероци треба да вклучува: врвна вредност, вредност на долината, временско време, максимум, минимум, просек, циклус / логаритам, итн.
16. Има двоен режим, работен режим на команда за ограничување на повратни информации за каналот.
17. Има функција на самопроверка на возбудувањето на сензорот што недостасува .
18. Температура: Температурата на медиумот за подмачкување може да се одржува на (37 ℃) и има систем за контрола на температурата.
19. Медиум за подмачкување : Површината на спојницата може да се потопи во подмачкувачкиот медиум, а подмачкувачкиот медиум треба да биде запечатен без истекување; и опремен со уред за следење на истекување.
20. Компоненти за тестирање: опремени со потребните алатки за тестирање, вчитување работни станици и полнење за сите движења.
21. Копче за итно стопирање: Опремата треба да биде опремена со копче за итно запирање.
22. Безбедносна заштита: Опремата треба да биде опремена со проѕирен и проѕирен термопластичен поликарбонат материјал заштитна обвивка; Има безбедносен уред за блокирање. Кога ќе се отвори вратата на заштитниот капак, опремата треба да може автоматски да го прекине тестирањето.
1.3 Работни услови
На собна температура во опсег од 10 ℃~ 35 ℃;
Релативната влажност не е поголема од 80%;
Правилна инсталација на цврста основа;
Во чиста средина без вибрации, корозивни медиуми и силни пречки во електромагнетното поле;
Опсегот на флуктуација на напонот на напојувањето не треба да го надминува номиналниот напон  10% .
10% .
2. Структурен состав
Машината за тестирање е поделена на три работни станици, кои се системот за погон на вретеното, системот за вчитување на примерокот и аксијалната сила Трите работни станици го делат истиот погон на вретеното. Динамички систем и софтверски систем за контрола.
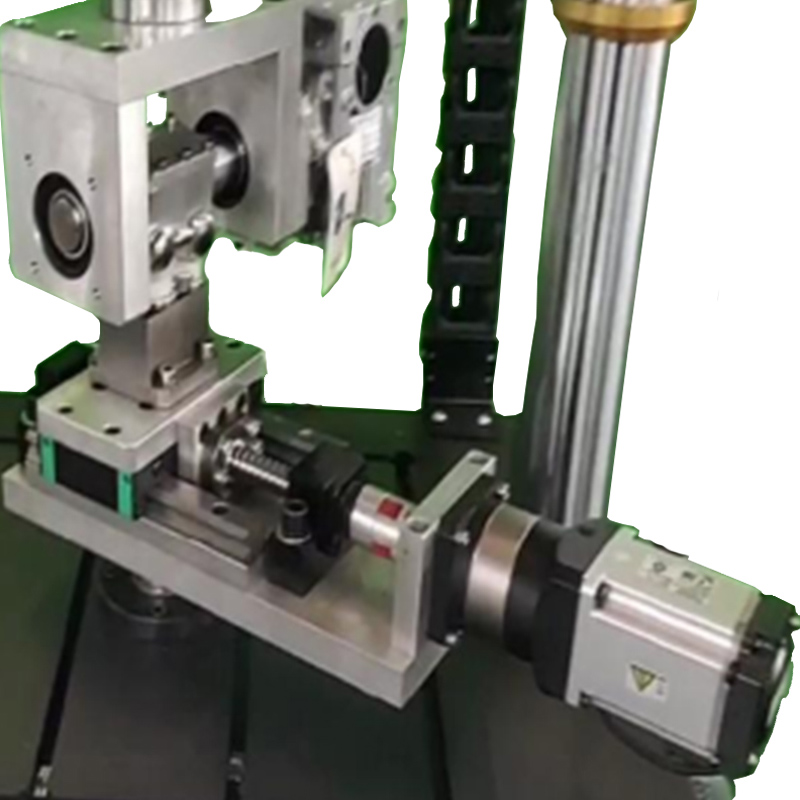
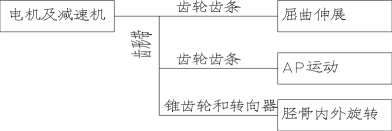
2.1 Систем за погон на вретеното
Моторот на оската користи Panasonic AC серво интегриран систем за контрола на брзината и мотор. Максималната моќност на моторот е 7,5 Kw, неговата моќност е поделена на 3 излезни линии.
Првата: по решетката за менувачот, електромагнетната спојка и сензорот за вртежен момент, тој станува ротирачко нишало на бедрената коска. мерење на вртежниот момент . Измерете го вртежниот момент за време на работата.
Вториот: откако ќе помине низ заби ременот и багажникот за менувачот , станува лево-десно повратен превод, придвижувајќи го примерокот AP движење .
Третиот: преку забниот појас, косината и управувачката опрема, тој се претвора во ротационо замавнување на тибијата, при што примерокот се ротира навнатре и нанадвор.
Трасата на пренос е прикажана на сликата подолу.
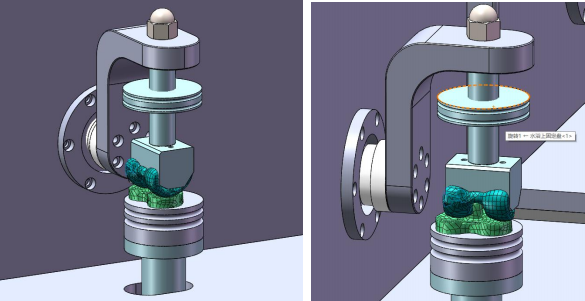
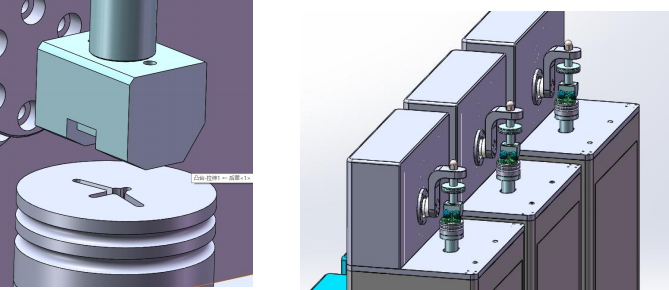
2.2 Систем за вчитување примероци
Системот за вчитување примероци ја симулира слободата на движење во човечки услови за компонентите на имплантот на зглобот на коленото Се инсталира и фиксира. Се состои од седиште за монтирање, лизгачко седиште, најлонско седиште, валјак, лизгачки ракав итн.
Специфичната имплементација е како што следува:
Инсталирањето на алати за абење на коленото зглоб е релативно комплицирано. Ве молиме инсталирајте го строго според дијаграмот. Покрај тоа, соодветните канали се прикачени.
Ве молиме користете го соодветниот број на жица кога ги поврзувате жиците.
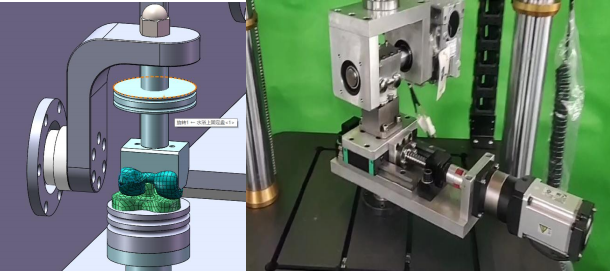
(Структурата прикажана на сликата се користи само за да се демонстрира принципот на движење, вистинскиот објект ќе преовладува)
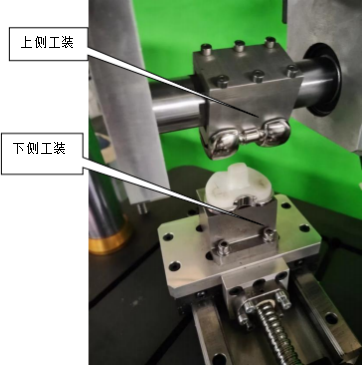

(Структурата прикажана на сликата се користи само за да се демонстрира принципот на движење, вистинскиот објект ќе преовладува)
Треба повторно да ги обработите горните и долните алатки според примерокот за да ги исполните барањата за тестирање. (Деталите за големината на секој производ варираат)

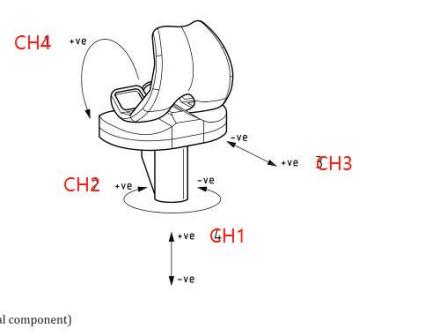
6. Избор на канал и поврзани прилагодувања
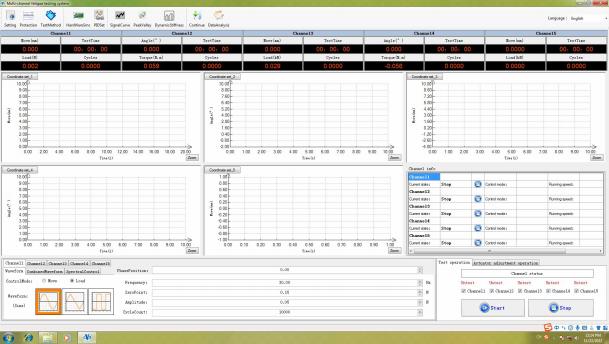
Во комбинација со горната слика, проверете кој канал работи со проверка на каналот. При извршување на ISO 14243.3, изберете 1-4 патека, Канал 5 е канал за проширување за последователни надградби. За други експерименти со една или со двојна оска, изберете го соодветниот канал.
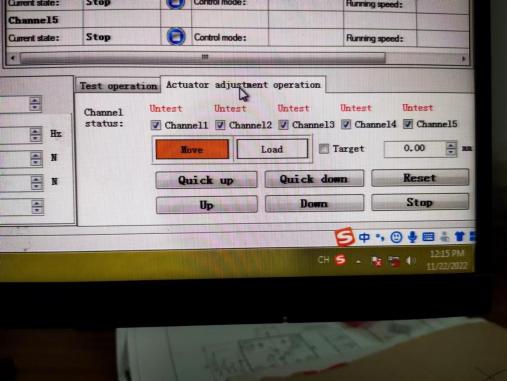
Брзо нагоре/нагоре = брзо вчитување/вчитување
Брзо спуштање/надолу = Брзо спуштање/надолу
7. Соодветно на ISO 14243.3, потребно е да се увезе контролната бранова форма, како што е прикажано на сликата:
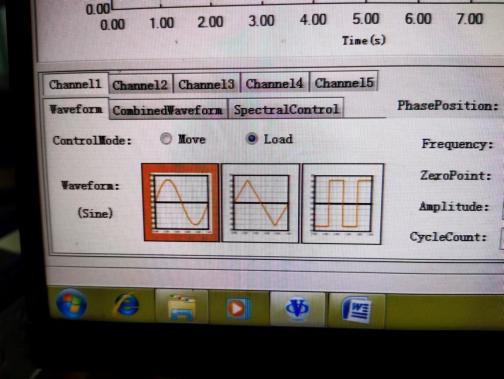
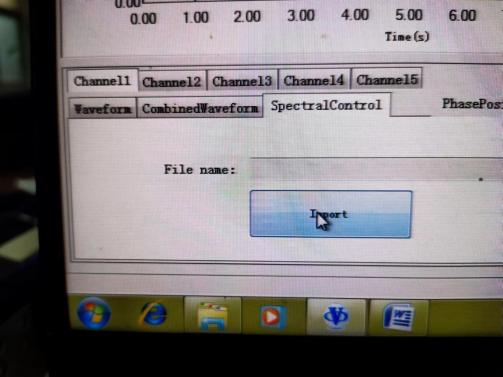
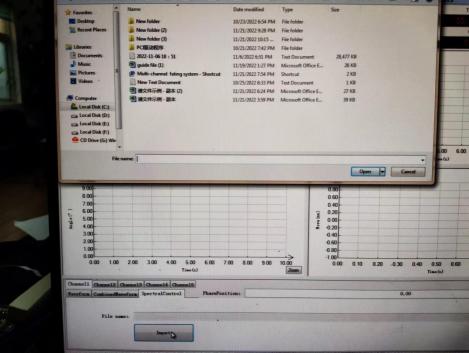
Изберете ја фабрички поставената бранова форма. Ако треба да поставите нова бранова форма или дејство, можете да го сторите тоа во оваа датотека. Изменете и зачувајте под друго име.
За детални прилагодувања за секој канал, ве молиме погледнете го прирачникот за софтвер за еден канал.
8. За заштитата:
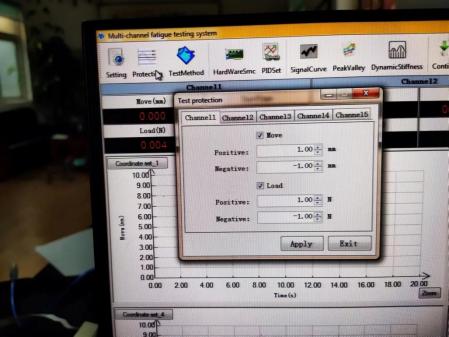
експериментот не се поместува или не може да се изврши по кликнување на Старт, проверете дали има некои параметри поставени надвор од толеранцијата во опциите за заштита.
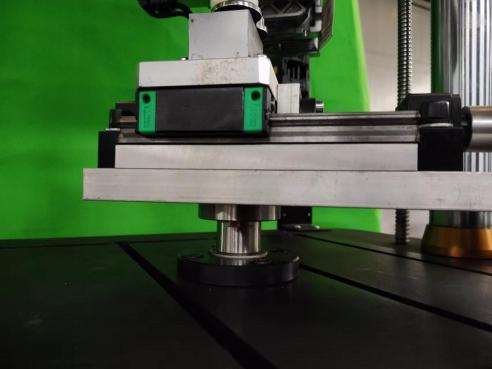
2.3 Систем за оптоварување на аксијална сила
Оваа машина прифаќа структура за полнење со пружини. Механизмот за вчитување е управуван од чекорен мотор, кој се пренесува преку кружен лак со заби појас, синхрона макара и прецизен пар со топчести завртки, и воден од прецизна шина за водич за линеарно движење за да го придвижи седиштето за примена на сила. Седиштето за примена на сила е фиксирано со механизам со пружина, кој применува сила на лизгачката платформа откако пружината е компресирана. Тестната сила помеѓу површините на триење на примерокот на валјакот е формирана. Со контролирање на моторот за придвижување на седиштето на силата да се движи напред и назад во вселената, односно, примената и големината на тест силата може да се контролираат. На рамнината на седиштето за примена на сила е инсталиран сензор за оптоварување. Соберете сигнали за сила. Водичот за лежиште за линеарно движење обезбедува примена и стабилност на силата за тестирање. Дел за полнење со пружина Лесен за товарење и растоварување.
Кога тестната сила ќе почне да се вчитува, сензорот ќе го внесе претходно поставениот притисок во контролниот систем на микрокомпјутерот и претходно поставениот притисок Микрокомпјутерот потоа го контролира моторот да се врати назад додека притисокот на системот не се избалансира со претходно поставениот притисок.
2.4 Систем за натопување на оптоварување
од кутија за потопна течност, грејач, сензор за температура, перисталтичка пумпа, силиконска цевка итн.
Клиентите можат да обработат дупки за позиционирање на цилиндричната крајна површина според вистинската големина на примерокот, а аголот на стегање може да се прилагоди. По прилагодувањето на аголот, заклучете го левиот лизгач за позиционирање.
2.5 Софтверски систем за контрола Контролниот систем е инсталиран на контролната машина и е поврзан со тест-домаќин преку комуникациски кабел. Работното опкружување на софтверот е WINDOWS XP. Контролниот софтвер е графички интерактивен оперативен интерфејс, кој е одговорен за испраќање инструкции за контрола на стартувањето и запирањето на системот, работната брзина, силата на вчитување, температурата на течноста за потопување и собирање податоци за работата на системот како што се аксијална сила, вртежен момент, температура, време на тестирање. , итн за време на тестот. По пресметката и обработката, кривите на тест сила-време, вртежен момент-време и други криви на податоци се издаваат во форма на графикони. Во комбинација со горната слика, проверете го каналот за да потврдите кој канал работи. При извршување на ISO 14243.3, изберете 1-4 канали, 5 t тој канал е канал за проширување за последователни надградби. За други експерименти со една или двооска, изберете го соодветниот канал. Брзо нагоре/нагоре = брзо вчитување/вчитување Брзо симнување/спуштање = брзо деинсталирање/деинсталирање 7. Соодветно на ISO 14243.3, потребно е да се увезе контролната бранова форма, како што е прикажано на сликата: Изберете ја фабрички подготвената форма на бранови. Ако треба да поставите нова бранова форма или дејство, можете да ја измените во оваа датотека. Зачувај под друго име. За детални прилагодувања за секој канал, погледнете во упатството за софтвер за еден канал. 8. За заштитата: експериментот не се поместува или не може да се изврши по кликнување на Старт, проверете дали има некои параметри поставени надвор од толеранцијата во опциите за заштита. 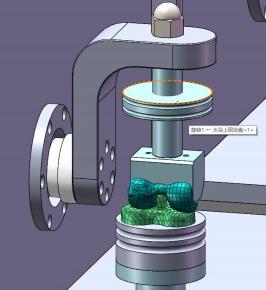
 {296} {496}
{296} {496}

 {296} {496}
{296} {496}
 Машина за тестирање на замор со двоканален и баланс бар
Машина за тестирање на замор со двоканален и баланс бар
 Машини за тестирање на триење на забни материјали
Машини за тестирање на триење на забни материјали
 Машина за тестирање на замор со ротирачко свиткување
Машина за тестирање на замор со ротирачко свиткување
 Машина за тестирање на замор за свиткување на коскената плоча
Машина за тестирање на замор за свиткување на коскената плоча
 Интрамедуларна машина за тестирање на стрижење нокти
Интрамедуларна машина за тестирање на стрижење нокти
 Машина за тестирање на замор на компресија и торзија на системот за внатрешна фиксација на 'рбетот
Машина за тестирање на замор на компресија и торзија на системот за внатрешна фиксација на 'рбетот